


RACH in Non-Terrestrial Networks (NTN)
RACH is a fundamental procedure for initial connectivity, UL synchronization, and scheduling grant b/w UE and Network. It is a well-known and mature procedure in traditional terrestrial RAN but its implementation in Non-Terrestrial Networks (NTN) introduces unique and more complex set of technical challenges.
In terrestrial RAN, rf signals typically travels short and a predictable distances with relatively stable propagation where as in NTN networks involving LEO, MEO, and GEO satellites, the rf signal is influenced by extreme propagation distances, rapid satellite motion, dynamic coverage footprints, and time-varying channel conditions. All these significantly affect the timing, frequency, and channel reliability on which traditional RACH procedures are based.
In this blog post we will study about the challenges and impacts on RACH producer due to key NTN-specific impairments such as large propagation delays, extended round-trip time, doppler frequency shifts, beam mobility, and large contention domains which can fundamentally alter the behavior and performance of RACH.
Also, satellite operate under strict constraints on spectrum availability and power budgets, increasing the importance of efficient and robust random access mechanisms.
Potential Impacts and Considerations for NTN RACH
Below is the list of major potential impact and consideration for NTN RACH procedure. At present, 3GPP specifications has address a subset of these issues, many are still open active for research and enhancement.
- Timing Advance (TA) Challenges
- Impact: In NTN, timing advance estimation is significantly more complex than in terrestrial systems due to large cell sizes, moving satellites, and varying UE-satellite distances. Incorrect TA estimation can result in uplink transmissions arriving outside the satellite’s reception window, causing collisions or complete reception failure.
- Considerations: Advanced TA estimation techniques, potentially leveraging satellite ephemeris data, GNSS assistance, or predictive algorithms, are required to dynamically adjust UE timing alignment and maintain uplink synchronization.
- Doppler Shift Effects
- Impact: The relative motion between satellites and UEs introduces significate Doppler frequency shifts, particularly in LEO systems. These frequency shift can degrade preamble detection, impair frequency synchronization, and increase the likelihood of failed RACH attempts.
- Considerations: Robust Doppler pre-compensation and frequency tracking mechanisms—at both UE and network sides—are essential to maintain reliable RACH performance under high mobility conditions.
- Varying Channel Conditions
- Impact: NTN links are subject to atmospheric attenuation, shadowing, scintillation, and long-distance path loss variations. These effects increase block error rates and can impair the UE’s ability to correctly receive RAR messages following a successful preamble transmission.
- Considerations: Adaptive modulation and coding, power control, and robust physical layer designs are required to maintain reliable RACH detection and processing across diverse channel conditions.
- Large Coverage Areas and UE Density
- Impact: Satellite beams typically cover very large geographical areas, potentially serving thousands of UEs simultaneously. This dramatically increases RACH contention levels and collision probability, particularly during mass access scenarios.
- Considerations: Efficient RACH resource partitioning, load-aware access control, and intelligent contention management mechanisms are required to scale random access performance.
- Increased Latency and Round-Trip Time (RTT)
- Impact: The physical large distance between UEs and satellites introduces significant one-way propagation delays and extended RTT. For example, GEO satellite links can experience RTTs in the order of hundreds of milliseconds. These delays directly impact the RACH message exchange timing, potentially leading to premature timer expiry, increased access failures, and prolonged access latency.
- Considerations: RACH-related timers such as the Random Access Response (RAR) window and contention resolution timers must be dimensioned to accommodate NTN-specific RTT values. NTN-aware timer configurations are essential to prevent unnecessary retransmissions and access failures.
- Increased Collision Probability
- Impact: The large number of UEs contending for a limited set of RACH preambles increases the probability of preamble collisions, reducing access efficiency and increasing latency.
- Considerations: Advanced contention resolution schemes, dynamic preamble allocation, and NTN-optimized access barring techniques are key to minimizing collision probability.
- Synchronization Challenges
- Impact: Initial synchronization in NTN is complicated by large timing uncertainties and frequency offsets. Failure to achieve accurate synchronization prevents UEs from initiating the RACH procedure altogether.
- Considerations: Enhanced synchronization techniques—combining precise timing acquisition, Doppler compensation, and satellite position awareness—are required to enable successful random access.
- Power Control Issues
- Impact: UEs in NTN experience wide variations in path loss depending on their location relative to the satellite beam. Insufficient transmit power may result in undetected preambles, while excessive power can cause inter-UE interference.
- Considerations: Adaptive and location-aware power control mechanisms are critical to balance detection reliability and interference management.
- Beam Management Complexity
- Impact: NTN systems rely heavily on multi-beam architectures. UEs may need to perform beam acquisition or switching during the RACH procedure, adding further complexity and latency.
- Considerations: Efficient beam discovery, beam tracking, and seamless beam handover mechanisms are essential to ensure reliable RACH execution in beam-based NTN systems.
RACH Feature Challenge and Impact in NTN
In this section, we will go through following three point specific to RACH feature in term of challenge and impacts.
- RACH Premable Detection
- RACH Response Window
- RACH Contention Resolution Timer
RACH Premable Detection Challenge in NTN
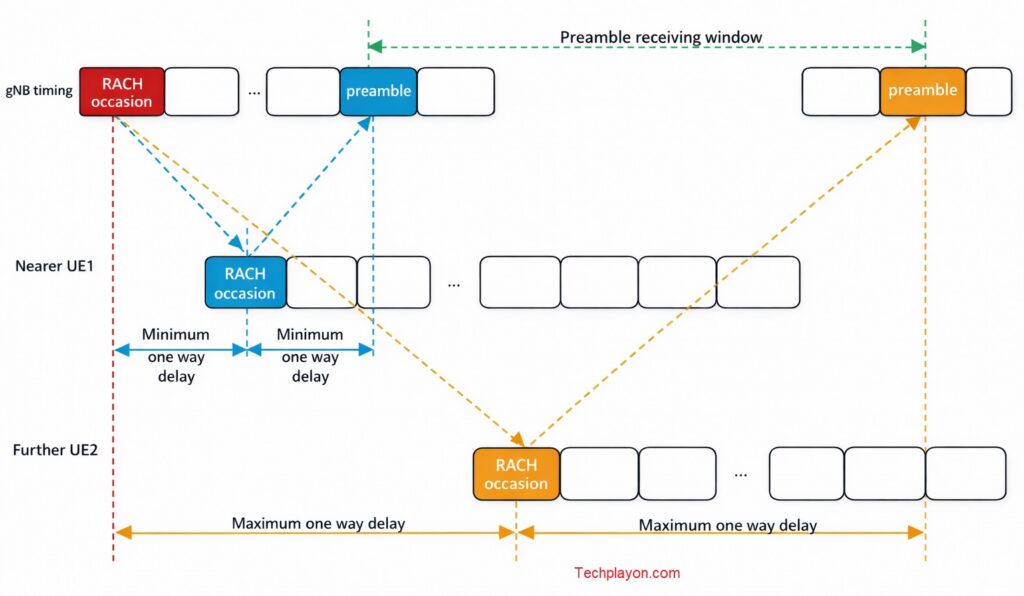
Due to the varying distances between the UE and NTN gNB, there can be a significant difference in the time it takes for a preamble to reach gNB. Some critical challenges due to this delay are listed.
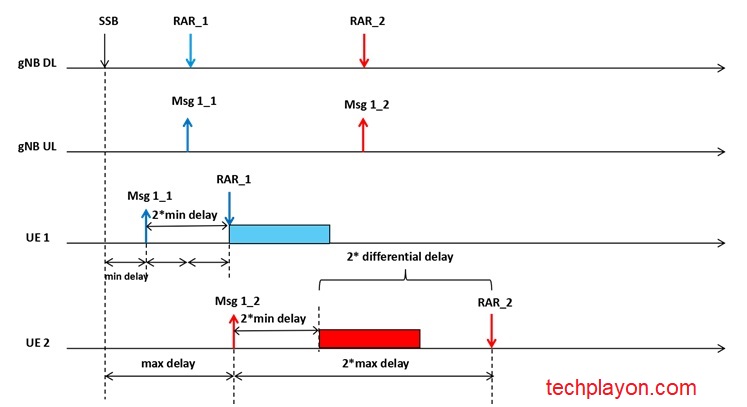
- MSG#1 Differential Delay Challenges: Due to the significant differences in propagation delays between UEs at varying distances from the eNB/gNB, the preambles transmitted during a RACH occasion can arrive at different times. This differential delay complicates the gNB’s ability to accurately receive and process RACH signals, leading to potential ambiguities in identifying the associated RACH occasions.
-
- Due to the vast distances in NTN cells, UEs within the same RACH occasion may transmit preambles that arrive at the network at different times. The diagram below shows how the minimum and maximum one-way delays determine the timing of preamble arrivals.

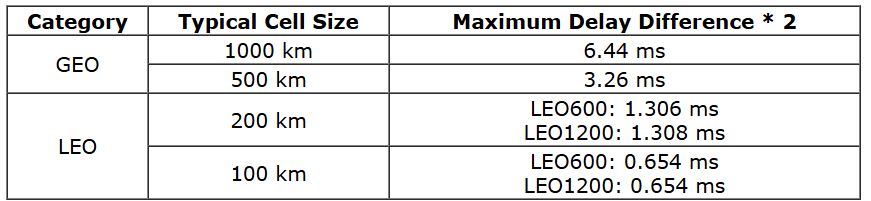
3GPP TR 38.821 – Table 7.2.1.1.1.2-1: provides Maximum delay difference*2 for typical GEO and LEO cell

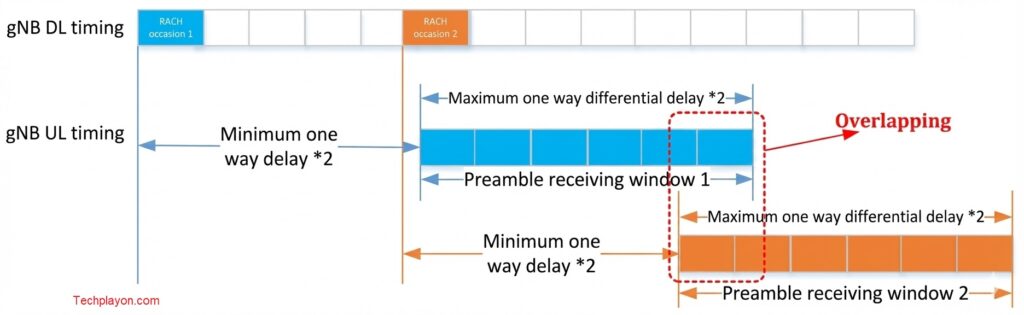
- Overlapping RACH Occasions: When RACH occasions are configured with inadequate time intervals between them, the preamble receiving windows for consecutive occasions may overlap. This overlap introduces a significant challenge, as it creates ambiguity for the network. In such cases, the gNB may find it difficult to determine which RACH occasion a received preamble belongs to, complicating the process of accurately calculating the timing advance. This issue can severely impact the efficiency and reliability of communication in Non-Terrestrial Networks. If the RACH occasions are configured with insufficient time gaps, the receiving windows for consecutive occasions might overlap. This can create ambiguity, as the network may struggle to associate a received preamble with its corresponding RACH occasion, making it difficult to calculate timing advance accurately.

Potential Solutions
There are following potential solutions to address these issues:
- Correct PRACH Configuration: Extend the interval between consecutive RACH occasions so that the receiving windows do not overlap. The interval should be greater than twice the maximum one-way delay.
- Right Preamble Division: Assign preambles to specific groups linked to distinct RACH occasions to reduce confusion.
- Preamble Frequency Hopping: Use different frequency bands for preambles in overlapping occasions to distinguish between them.
- 2-Step RACH Assistance Information: Include identifiers like the SFN index in the messages to help the network link preambles to the correct RACH occasion.
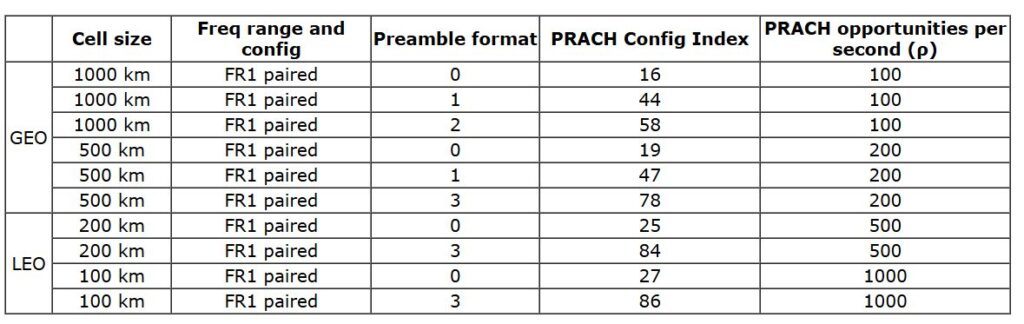
As per 3GPP TR 38.821 – Table 7.2.1.1.1.2-2 following PRACH configurations are feasible for a typical GEO or LEO cell.

NTN Challenges on RACH Response Window
In the Random Access (RA) procedure, a UE sends a preamble as MSG1 to the eNB/gNB and then monitors the PDCCH for a corresponding Random Access Response (RAR) which MSG2. In terrestrial systems, this response is typically received within a short, predefined time window i.e ra-ResponseWindow within few milliseconds. However, in NTN, the propagation delays are much longer due to the large distances involved e.g., communication with satellites in GEO or LEO. This extended delay means that the RAR cannot be received within the terrestrial time window, resulting in failed RA attempts and the need for procedural enhancements.
In Simple words we can say, when a device wants to connect, it sends a “preamble” (Msg1) – think of it like ringing the doorbell. It then waits for a “response” (Msg2) – like house owner opening the door. This waiting time is the “response window”.
Normally, this works fine because the signal doesn’t travel very far. But with satellites, the signal has to travel a huge distance, causing a delay. The response might come after the device has stopped waiting, causing connection problems.

The maximum differential delay varies by orbit type:
- GEO: 10.3 ms, requiring a response window extension of at least 20.6 ms (2 × maximum differential delay), which exceeds the default 10 ms window.
- LEO: 3.18 ms, requiring a response window extension of 6.36 ms, which is within the 10 ms default but still necessitates careful configuration.
For UEs initiating RA from locations with significantly different propagation delays (e.g., cell edges), a response window that does not consider these delays risks missing the RAR altogether.
Potential Solutions for RACH Window
To address this challenge, two main adjustments to the ra-ResponseWindow are proposed:
- Configurable Offset for the Start of the Response Window
- RAR window start should include an offset to account for the propagation delay in NTN. This offset should be configurable to adapt to varying network scenarios.
- For UEs with location information, the offset can be calculated using the known round-trip delay, which eliminates the need to extend the response window further.
- Extension of the Response Window Duration
- For UEs without location information, where the round-trip delay cannot be accurately estimated, the window itself must be extended to ensure the RAR is received within the valid monitoring duration.
- The extended duration must accommodate the maximum differential delay i.e., the time difference between the minimum and maximum propagation delays within a cell, plus an additional margin for processing delays at the gNB and scheduling flexibility.
NTN Challenges on Contention Resolution Timer
In RACH procedure, after the UE sends an RRC Connection Request MSG3, it waits for MSG4, the contention resolution message, to determine if its random access attempt was successful. The duration for which the UE monitors for MSG4 is governed by the ra-ContentionResolutionTimer. This timer starts immediately after MSG3 is transmitted.
With NTN, due to the long distances between the UE and the satellite base station , the round-trip delay is much longer compared to terrestrial systems. While the maximum configurable value of the ra-ContentionResolutionTimer can technically cover these longer delays, this approach is inefficient and may unnecessarily consume power on the UE side. NTNs often require power-efficient operation, especially for UEs in remote or battery-constrained applications. Therefore, the default behavior of the ra-ContentionResolutionTimer must be adjusted to better align with NTN propagation delays while conserving UE power.
Potential Solutions for Contention Resolution Timer
A possible solution is to introduce an offset for the start of the ra-ContentionResolutionTimer in NTN scenarios. Instead of starting the timer immediately after MSG3 transmission, the timer would begin only after an offset period that accounts for the expected round-trip delay in NTN.
This adjustment ensures the timer is active only during the period when MSG4 is expected to be received. By aligning the timer with the NTN-specific delays, the UE avoids unnecessarily monitoring for MSG4 during periods when it is unlikely to arrive. This saves power while still ensuring compatibility with NTN’s longer delays. Below is the benefits of the Offset-Based Timer Adjustment.
- Power Efficiency: The UE will only monitor for MSG4 when it is realistic for the message to arrive, reducing unnecessary power consumption.
- Flexibility for Various Orbits: The offset can be configured based on the type of NTN, whether GEO or LEO, as the propagation delay varies significantly between these systems.
- Scalability: This approach accommodates NTNs of different sizes and propagation delay characteristics without requiring extensive modifications to the standard contention resolution procedure.
- Robustness: Aligning the timer with realistic delays prevents premature expiration of the contention resolution timer, which could otherwise cause unnecessary retransmissions or failures in NTN communication.
Summary of Challenges and Impacts
| Challenge | Impact | Typical NTN Effect |
|---|---|---|
| Timing Advance | Uplink misalignment | Varies with satellite motion |
| Doppler Shift | Frequency errors | Large in LEO/GEO |
| Preamble detection | Decode ambiguities | Due to differential timing |
| RAR Window | Missed responses | Long propagation delay |
| Contention Timer | UE power drain | Early expiry vs long RTT |
| UE Density | Collisions | Higher contention |
Related Post
- 5G Non-Terrestrial Network Terminologies
- 3GPP NTN Use Case Categories: Service Continuity, Ubiquity, Scalability
- 5G Satellite Architecture | Transparent and Regenerative Payload
- 3GPP Frequency Bands for 5G Satellite Communication
- System Information 19 – SIB19 For 5g Satellite NTN
References
- Non-Terrestrial Networks (NTN)
- 3GPP TR 38.811 : Study on New Radio (NR) to support non-terrestrial networks
- 3GPP TR 38.821 : Solutions for NR to support non-terrestrial networks (NTN)
- 3GPP TR 38.913 : Study on scenarios and requirements for next generation access technologies
- 3GPP TR 23.737 – Study on architecture aspects for using satellite access in 5G
- RP-193234 : Solutions for NR to support non-terrestrial networks (NTN)
- TS 22.261 : Service requirements for the 5G system; Stage 1 (Release 18)